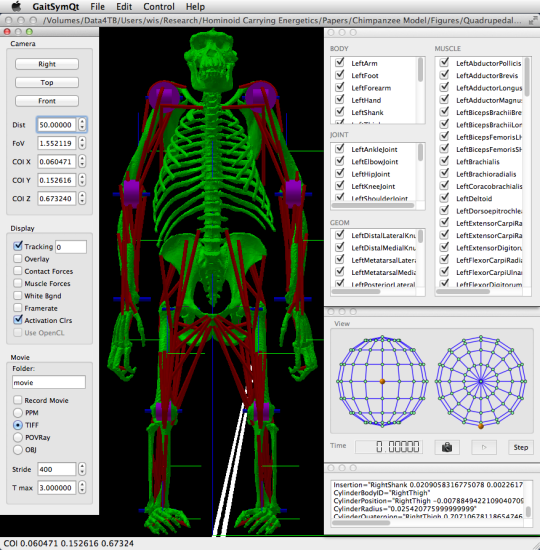
このGaitSymはフォワード動的モデリングプログラムである。何それが意味することは、あなたが力を指定することで、プログラムが動きを計算するために、ニュートンの法則を使用しています。あなたが始めるために、ヒトおよび非ヒト2Dおよび3Dモデルの範囲を含む、ここからダウンロードすることができます。これは、ハードワークのほとんどを行うためにオープンダイナミクスエンジンの物理エンジンを使用し、ユーザーが任意のプログラミングを行う必要はありませんので、ファイル形式や表示システムを提供しています。力は、筋肉活性化レベルから直接生成することができ、フックの数は、そのような遺伝的アルゴリズムのようなグローバルな最適化ツールを使用することを可能にするように、また、さまざまな筋肉のモデルを提供する。その主な機能は次のとおりです:高速、柔軟かつ堅牢なフォワードダイナミックモデラー。洗練されたコンタクトシステム。ミネッティ-アレクサンダーとUmberger-Gerritsenマルタン代謝コストの推定のための筋肉モデル。筋肉のパスのポイントとシリンダーラッピングを経由して、三角形メッシュのアウトラインから算出される慣性テンソル。世界またはローカルは、効率的なモデル作成のための座標系。完全なソースコードが含ま(C ++はMacOSXは、Windows、Linux、および他のUnixシステムでコンパイルされます);ヒトおよび非ヒト2Dおよび3Dモデルの様々な完了します。外部光線追跡を介して高品質の静止画やアニメーションを生成します。
のこのリリースのの新機能:ます。
- 新スライダージョイント
- 減衰腱、活性化動態、非線形ばね特性、及び優れた数値的安定性を含む新しい筋モデル
- 新しいボックスカードライバー
- 新しいボックスのgeom
- 二つの平行な円柱の周りを包むことができる新しい筋肉のストラップ
- 直接ポイントクラウドの可視化
- 過度のヒンジ関節制限トルク上、またはデータ·ターゲットしきい値に中止
- トラッキング位置を追跡シミュレーションを一元化するオフセットすることができます。
コメントが見つかりません